MuJoCo
公式サイト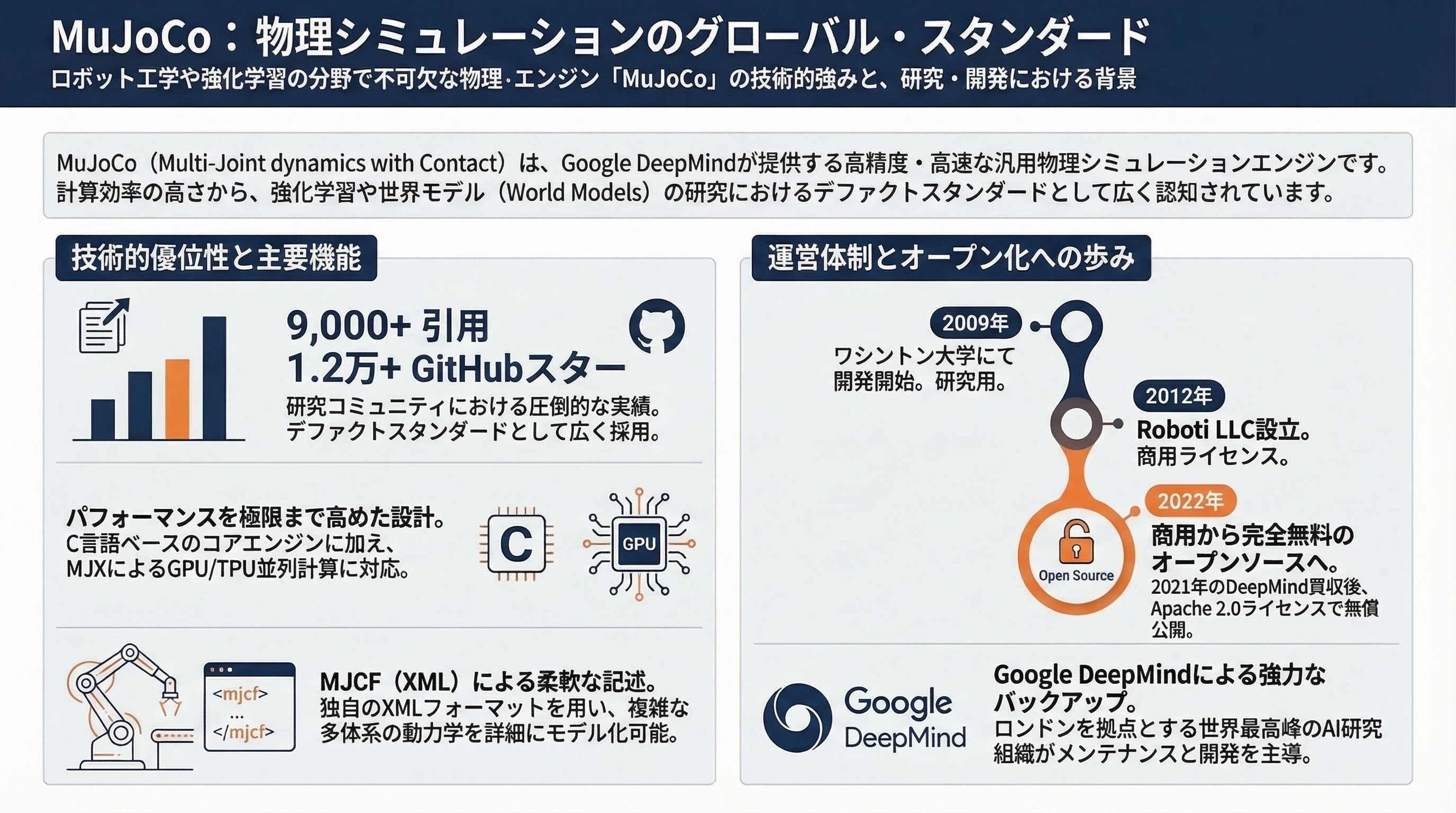
1. サービス概要
MuJoCo(Multi-Joint dynamics with Contact)は、ロボット工学、バイオメカニクス、グラフィックス、機械学習(特に強化学習)などの分野で利用される、高精度かつ高速な汎用物理シミュレーションエンジンです。「World Models(世界モデル)」の文脈においては、エージェントが環境の動特性を学習するための「シミュレーション環境(仮想世界)」を提供し、モデルベース制御や状態推定、システム同定を支援する役割を担います。
- 主な機能:
- 多体系動力学の計算: 関節、接触、摩擦、制約条件を含む複雑な多体系の順力学・逆力学計算。
- MJCF(XML)形式: 独自のXMLフォーマットを用いた、柔軟かつ詳細なモデル記述。
- 対話型ビジュアライザー: OpenGLによるリアルタイム描画とGUI操作。
- 並列サンプリング: 最適制御やサンプリングベースのアルゴリズムに適した、高速なバッチ処理機能。
- ユーザー数: 明確な数値は非公開ですが、GitHubのスター数は約1.2万を超え、学術論文での引用数は9,000件以上に達するなど、研究コミュニティにおけるデファクトスタンダードの一つとなっています。
- 対応プラットフォーム: Windows、Linux、macOS。
2. 使用している技術スタック
MuJoCo は計算効率を最大化するため、低レイヤーの言語とデータ構造を中心に構築されています。
- コアエンジン: C言語 / C++(ランタイムモジュールはパフォーマンス向上のため純粋なCで記述)。
- API / バインディング:
- C API: ネイティブのインターフェース。
- Python: mujoco(公式)、dm_control(DeepMind提供)。
- C# / Unity: Unityエンジン用プラグイン。
- JavaScript: WebAssembly(Wasm)を通じたブラウザ対応。
- グラフィックス / UI: OpenGL(UIフレームワークも外部ライブラリに依存せず、OpenGL上に独自実装)。
- 加速器対応: MJX(MuJoCo XLA)により、JAXを用いたGPU/TPU上での高速な並列シミュレーションが可能。
- モデル記述: XML (MJCF)。
3. 会社概要
現在、MuJoCo は独立した会社ではなく、Google 傘下の AI 研究部門によって運営されています。
- 運営会社名: Google DeepMind(旧:Roboti LLC からの買収により承継)
- 設立年: 2010年(DeepMind 社。MuJoCo の開発開始は2009年、Roboti LLC 設立は2012年頃)
- 本社所在地: イギリス ロンドン(6 Pancras Square, London N1C 4AG)
- 従業員数: 約2,000人以上(DeepMind 全体。MuJoCo 専用チームの人数は非公開)
4. 沿革、資本構成、国籍、役員情報
- 沿革:
- 2009年: ワシントン大学の Emanuel Todorov 教授が開発を開始。
- 2012年: Roboti LLC が設立され、商用ソフトウェアとしてライセンス販売を開始。
- 2021年10月: Google DeepMind が Roboti LLC から MuJoCo を買収。
- 2022年5月: Apache 2.0 ライセンスの下、オープンソース化(完全無料化)。
- 資本構成: Google (Alphabet Inc.) の完全子会社。
- 国籍: イギリス(Google DeepMind)、アメリカ合衆国(開発背景・Roboti LLC)。
- 役員情報(運営責任者・開発主導者):
- Demis Hassabis(Google DeepMind CEO): イギリス国籍。チェスの神童、ゲーム開発者を経て DeepMind を共同創業。
- Emanuel Todorov(開発者 / Roboti LLC 創業者): ブルガリア/アメリカ国籍。ワシントン大学教授。応用数学および神経科学のバックグラウンドを持ち、物理エンジンの設計思想を構築。
- Yuval Tassa / Tom Erez: Google DeepMind の主要エンジニア。MuJoCo の主要論文の共著者であり、買収後のメンテナンスとオープンソース化を主導。