ROS 2
公式サイト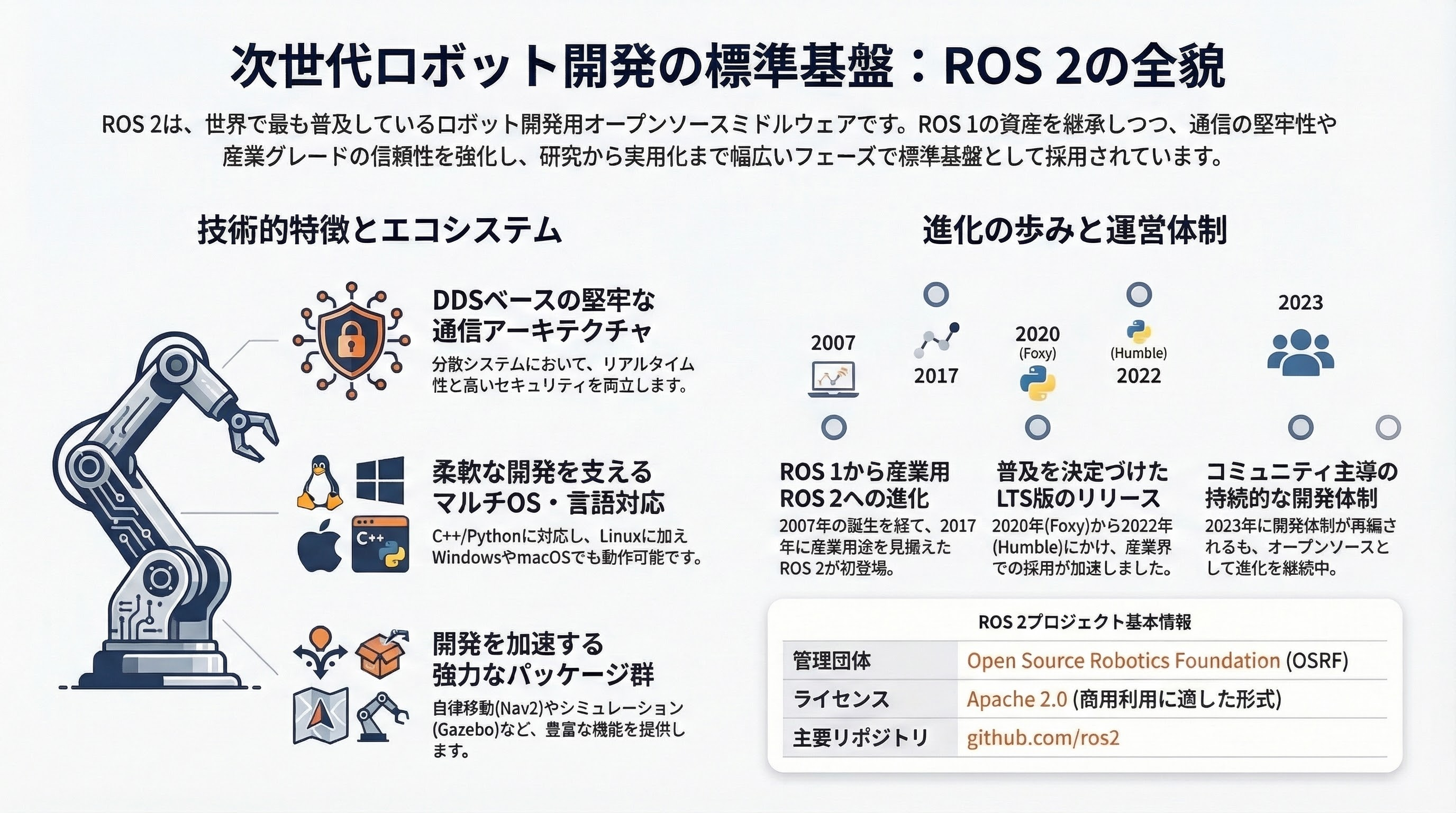
1. サービス概要
ROS 2(Robot Operating System 2)は、ロボティクスソフトウェア開発のための最も広く使用されているオープンソースミドルウェアフレームワークである。ロボットのセンサー処理、アクチュエータ制御、経路計画、自己位置推定、ナビゲーション、マニピュレーションなど、ロボット開発に必要な幅広い機能をモジュラーなパッケージとして提供する。ROS 1の後継として設計されたROS 2は、リアルタイム性、セキュリティ、マルチロボット対応、産業グレードの信頼性を大幅に向上させている。DDS(Data Distribution Service)をベースとした通信レイヤーにより、分散システムでの堅牢な通信を実現する。研究用途から産業用途まで、世界中のロボティクスプロジェクトの標準的な基盤として利用されている。
2. 使用している技術スタック
- 言語: C++、Python(主要クライアントライブラリ)
- 通信ミドルウェア: DDS(Data Distribution Service)。複数のDDS実装に対応(Fast DDS、Cyclone DDS等)
- ビルドシステム: colcon(ビルドツール)、ament(ビルドシステム)
- 主要パッケージ: Navigation 2(自律ナビゲーション)、MoveIt 2(マニピュレーション計画)、ros2_control(ハードウェア抽象化)、Gazebo(シミュレーション)
- 対応OS: Ubuntu Linux(主要サポート)、Windows、macOS
- ライセンス: Apache 2.0
- 現行ディストリビューション: Humble、Iron、Jazzy(LTSリリースあり)
3. 会社概要
| 項目 | 内容 |
|---|---|
| プロジェクト名 | ROS 2(Robot Operating System 2) |
| 管理団体 | Open Source Robotics Foundation (OSRF) / Open Robotics |
| 起源 | Willow Garage(2007年~) |
| 所在地 | サンフランシスコ、カリフォルニア州、米国 |
| ライセンス | Apache 2.0 |
| カテゴリ | オープンソースロボティクスミドルウェア |
| リポジトリ | github.com/ros2 |
4. 沿革、資本構成、国籍、役員情報
沿革
- 2007年: Willow GarageにてROS(ROS 1)の開発が開始。Scott Hassan(Google初期エンジニア)が設立したWillow Garageのロボット研究所で誕生
- 2010年: ROS 1.0リリース。ロボティクス研究コミュニティで急速に普及
- 2012年: Willow GarageからスピンオフしてOpen Source Robotics Foundation(OSRF)が設立。ROSの管理を引き継ぐ
- 2014年: ROS 2の開発計画を発表。産業用途への対応を主要目標に掲げる
- 2017年: ROS 2初の公式リリース(Ardent Apalone)
- 2020年: ROS 2 Foxy Fitzroy(LTS)リリース。産業界での採用が加速
- 2022年: ROS 2 Humble Hawksbill(LTS)リリース。安定性・機能が大幅に向上
- 2023年: Open RoboticsのメンバーがIntrinsic(Alphabet傘下)に移籍。ROSの開発体制が再編
- 2024年: ROS 2 Jazzyリリース。コミュニティ主導の開発が継続
組織構成
- Open Source Robotics Foundation(OSRF): 非営利団体としてROSの開発・管理を担当
- Open Robotics: OSRFの営利部門。企業向けサポート・コンサルティングを提供
- 2023年以降: Intrinsic(Alphabet/Google傘下)がOpen Roboticsの事業の一部を吸収。ROSコミュニティはオープンソースとして継続
主要人物
- Brian Gerkey(Open Robotics元CEO): ROS開発の中心人物。Willow Garage時代からROSプロジェクトを主導。2023年にIntrinsicへ移籍
- Morgan Quigley(ROS原作者): Willow GarageでROSの最初のバージョンを設計・実装したエンジニア。Stanford大学出身
- Tully Foote: ROS開発の主要コントリビューター。ビルドインフラ・リリース管理を担当