Isaac Lab
公式サイト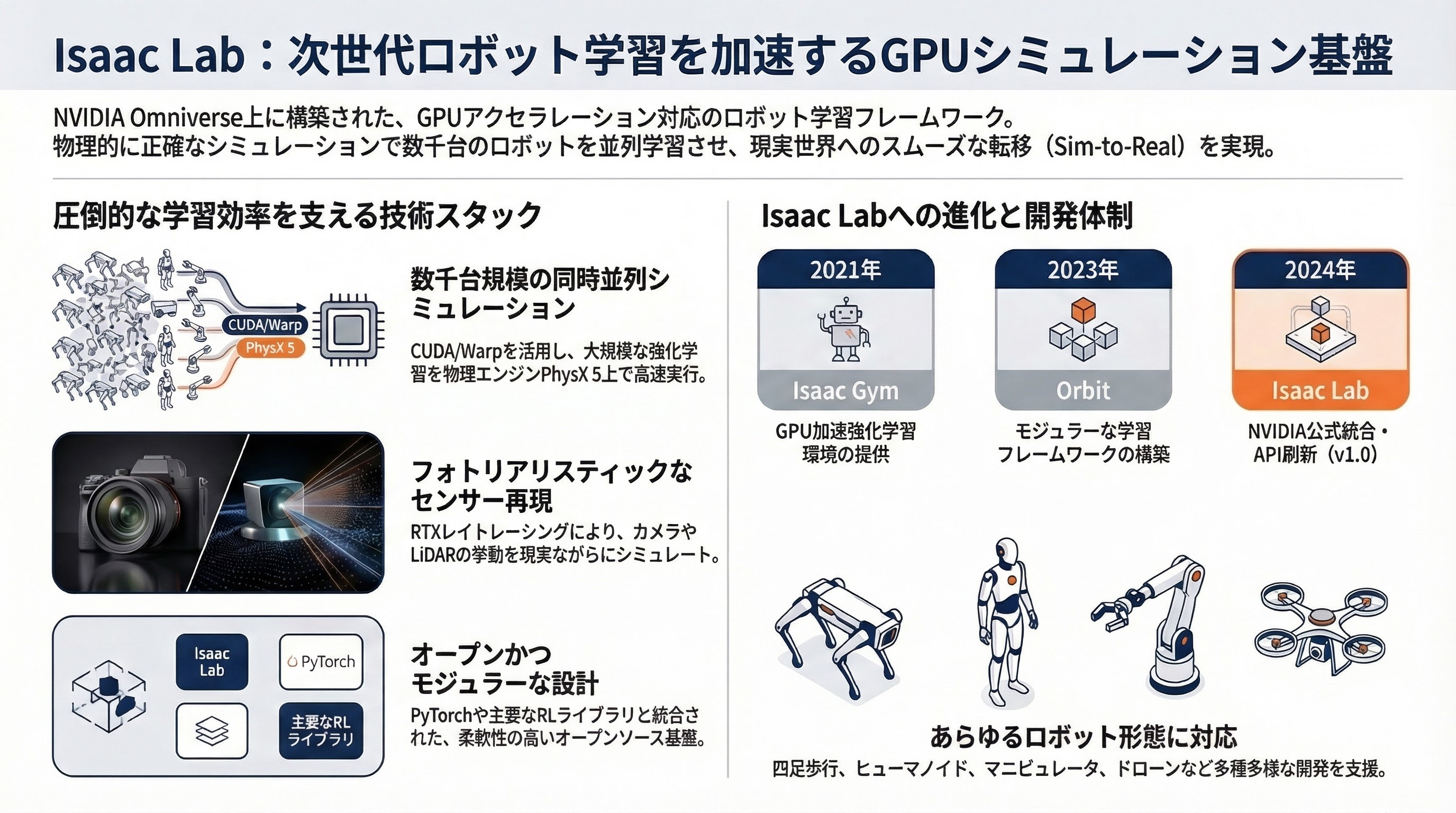
1. サービス概要
Isaac Labは、NVIDIAが開発するロボット学習のためのGPUアクセラレーション対応シミュレーションフレームワークである。NVIDIA Isaac SimおよびOmniverseプラットフォーム上に構築されており、強化学習(RL)や模倣学習によるロボット制御ポリシーの学習を大規模に高速化することを目的としている。物理的に正確なシミュレーション環境内で数千のロボットを同時に並列シミュレーションし、現実世界への転移(Sim-to-Real)を見据えた学習を効率的に行うことができる。歩行ロボット、マニピュレータ、ドローンなど多様なロボットプラットフォームに対応し、研究者やロボット開発者がカスタムタスクを容易に定義・実験できるモジュラーな設計となっている。オープンソースとして公開されている。
2. 使用している技術スタック
- 基盤: NVIDIA Isaac Sim(物理シミュレーション)、NVIDIA Omniverse(3Dコラボレーションプラットフォーム)
- 物理エンジン: NVIDIA PhysX 5(GPUアクセラレーション対応)
- レンダリング: RTX対応レイトレーシング。フォトリアリスティックなセンサーシミュレーション(カメラ、LiDAR、深度センサー)
- 言語: Python
- 学習フレームワーク: PyTorch。rl_games、RSL-RL、Stable Baselines3、SKRL等の強化学習ライブラリと統合
- GPU並列化: CUDA / Warpによる大規模並列シミュレーション・学習
- 対応ロボット: 四足歩行ロボット、ヒューマノイド、産業用マニピュレータ、ドローン等
- ライセンス: オープンソース(BSD-3-Clause)
- リポジトリ: github.com/isaac-sim/IsaacLab
3. 会社概要
| 項目 | 内容 |
|---|---|
| プロジェクト名 | Isaac Lab(旧Orbit → Isaac Lab) |
| 開発元 | NVIDIA Corporation |
| 所在地 | サンタクララ、カリフォルニア州、米国 |
| ライセンス | オープンソース |
| カテゴリ | ロボット学習シミュレーションフレームワーク |
| 前身 | NVIDIA Isaac Gym → Orbit → Isaac Lab |
4. 沿革、資本構成、国籍、役員情報
沿革
- 2019年: NVIDIAがIsaac Simの初期バージョンをリリース。ロボットシミュレーション市場に参入
- 2021年: Isaac GymをリリースしGPUアクセラレーション対応の強化学習シミュレーション環境を提供。数千環境の並列シミュレーションを実現し、ロボット学習研究に大きな影響を与える
- 2023年: ETH ZurichのMayank Mittal氏らによりOrbitフレームワークが開発。Isaac Simの上に構築されたモジュラーなロボット学習フレームワーク
- 2024年: OrbitがNVIDIA公式プロジェクト「Isaac Lab」として統合・リブランド。Isaac Gymの後継として位置づけ
- 2024年: Isaac Lab v1.0リリース。タスク定義・環境構築のAPIを刷新。コミュニティからの貢献を積極的に受け入れる体制を整備
NVIDIA(開発元)の概要
NVIDIAは1993年にJensen Huang、Chris Malachowsky、Curtis Priemにより設立されたGPUメーカーである。当初はグラフィックスプロセッサの開発が主事業であったが、CUDA(2006年)の提供を機にGPGPU市場を開拓。現在はAI・データセンター・自律走行車・ロボティクス分野の基盤技術を提供する世界最大級のテクノロジー企業。時価総額は2024年時点で1兆ドルを超える。
主要人物
- Jensen Huang(NVIDIA CEO): NVIDIA創業者兼CEO。台湾生まれ、アメリカ育ち
- Dieter Fox(NVIDIA シニアリサーチディレクター): ワシントン大学教授兼任。NVIDIAのロボティクス研究を統括
- Mayank Mittal(Isaac Lab / Orbit主要開発者): ETH Zurichの博士課程研究者。Isaac Labの設計・実装を主導